光场
光场图像是通过多个视角的图像组成的,通常是一个二维数组,其中每个元素是一个图像。这些二维图像是行列对齐的,每个图像都对应一个不同的视角(在 u 和 v 维度上)。
从数据的角度直观来看,就是维度是u v h w c的多维图像,其中u v表示角度分辨率,h w表示空间分辨率。
光场的视角warp
光场图像的视角 warp(变换)是指通过改变观察点(视角)来重建光场图像的不同视角。这通常通过光场图像中的视差信息来实现,目的是从给定的视角重建新的视角图像。
视角 warp 基本原理是通过对原始图像应用视差(或光流)信息,在不同视角之间进行像素的重新定位或插值。这相当于在给定的视差图的指导下,将光场图像从一个视角“扭曲”到另一个视角。
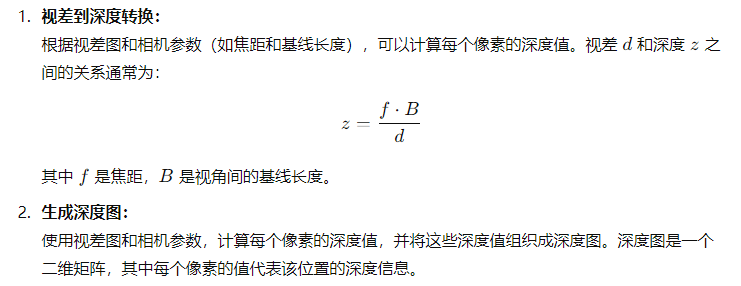
视差和深度的关系
- 视差图
disparity表示场景中每个像素在不同视角下的深度变化。视差越大,表示物体离观察者越近,视差越小则表示物体远离观察者 - 视差和深度成反比
视角 Warp 过程
- 获取视差图:从源视角的图像中获取视差图(如果没有视差图,可以使用光流估计算法生成)。
- 计算像素偏移:根据视差图中的每个像素值计算对应的偏移量。视差图中的每个像素的值表示该位置的深度差,进而影响视角变换时该位置的偏移量。
- 应用偏移:根据计算得到的偏移量,将原始图像中的每个像素映射到新的视角位置。这一步是最关键的,它可以通过将每个像素按照偏移量“拉伸”或“压缩”到新的位置来实现。
- 插值填充:由于变换后的图像可能没有精确的像素对齐,因此需要使用插值方法填充空缺区域,确保图像平滑。
数学公式
假设原始光场图像为 I(u, v, x, y),其中u,v 是视角索引,x, y是图像的空间坐标。视差图为D(u,v,x,y),表示每个像素的视差。
视差偏移公式:
假设我们想要根据视差图将图像从视角
(u,v)变换到视角(u′,v′),则每个像素的新的位置可以通过以下公式计算: $$ x′=x−D(u,v,x,y) \cdot \Delta u $$$$ y′=y−D(u,v,x,y) \cdot \Delta v $$
其中 $\Delta u$ 和 $\Delta v$ 是视角之间的差异。
插值: 由于视角变换可能导致某些像素点位置不再落在原始图像的网格上,因此需要使用插值方法(如双线性插值)来确定新的像素值: $$ I(u′,v′,x′,y′) \approx \text{Interp}(I(u, v, x, y), x', y') $$
代码实现
视角 Warp 的常见方法
- 基于视差的像素映射:根据视差图计算像素的空间偏移,然后将原始图像的像素迁移到新位置。
- 深度图和重投影:基于场景的深度信息,通过投影变换将图像从一个视角“映射”到另一个视角。
下面是基于视差的像素映射的代码实现:
python
def view_warp(lf, disparity):
"""
视角 warp
@param lf: light figures 光场图像 是一个多维张量
@param disparity: 视差
@return: warp后的光场图像
"""
# warp LF with one specific disparity
[batch, height_view, width_view, height, width, channel] = lf.shape
# 将 lf 重新调整形状并转置,使其形状变为 [n*u*v, c, h, w]
# n*u*v:是所有视图的总数(将 batch、height_view 和 width_view 展平)
# permute:将维度重新排列
lf_t = lf.reshape((-1, height, width, channel)).permute((0, 3, 1, 2)) # n*u*v,c,h,w
# 计算视图中心点
center_u = height_view // 2
center_v = width_view // 2
# 存储所有视图的窗格
grid = []
for u in range(height_view):
for v in range(width_view):
# 计算每个视图相对于中心视图的偏移量
dispmap_u = -disparity * (u - center_u)
dispmap_v = -disparity * (v - center_v)
# 计算高度范围和宽度范围的坐标网格,并应用视差映射
h_range = torch.arange(0, height).view(1, height, 1).expand(batch, height, width) + dispmap_u # [n,h,w]
w_range = torch.arange(0, width).view(1, 1, width).expand(batch, height, width) + dispmap_v
# 将 h_range 和 w_range 归一化到 [-1, 1] 之间
h_range = 2. * h_range / (height - 1) - 1
w_range = 2. * w_range / (width - 1) - 1
# 将 w_range 和 h_range 堆叠在一起,形成一个形状为 [n, h, w, 2] 的张量,并将其添加到 grid 列表中
grid_t = torch.stack((w_range, h_range), dim=3) # [n,h,w,2]
grid.append(grid_t)
# 将所有视图的变换网格连接在一起,形成一个形状为 [n*u*v, h, w, 2] 的大网格
grid = torch.cat(grid, 0) # [n*u*v,h,w,2]
# 使用 grid_sample 函数根据变换网格对光场图像进行采样,生成 warp 后的光场图像。
# grid_sample 按照网格的位置采样图像,生成新的视角图像。
warped_lf = torch.nn.functional.grid_sample(lf_t, grid.type_as(lf_t), padding_mode="zeros", align_corners=True)
# 将 warp 后的光场图像重新调整形状,使其形状变为 [n, u, v, h, w, c],并将通道维度移动到最后一个维度
warped_lf = warped_lf.reshape((batch, height_view, width_view, channel, height, width)).permute((0, 1, 2, 4, 5, 3))
return warped_lf