LF数据增强
光场Light Field图像 数据增强操作
上采样upsampling
翻转flipping
旋转rotation
颜色转换color conversion
visdom
visdom刚开始需要和screen联动使用,因为需要screen创建窗口,并保持visdom的持续运行。
screen是 Linux 系统中用于创建、管理和恢复会话的工具,可以使用相关命令来查看有哪些窗口。
screen 常用命令
试了一下,在xshell里除了Ctrl + A + D 的快捷键其他快捷键都无法使用,还是老老实实用命令操作比较稳妥
安装screen工具
apt install screen // Ubuntu系统
yum install screen // CentOS系统创建窗口
命令:screen -S 窗口名称
查看有哪些窗口
命令:screen -ls
进入窗口 / 恢复会话
命令:screen -r 窗口名称
也可以通过 Ctrl + a 然后按 0 到 9 之间的数字来切换到对应编号的窗口,或者使用 Ctrl + a 然后按 n(下一个窗口)、p(上一个窗口)来切换。
暂时退出窗口 / 分离会话
- 命令:
screen -d 窗口名称 - 快捷键:
Ctrl + A + D
永久删除窗口
方式一:
- 进入想要删除的窗口,按下
Ctrl + a然后按k。系统会提示是否真的要杀死这个窗口,输入y确认即可。
方式二:
- 命令:
screen -S [窗口名或编号] -X quit
重命名当前窗口
- 按下
Ctrl + a然后按A,之后输入新的窗口名称。
方式二:
命令删除:screen -S 窗口名称 -X quit
保存窗口内容
可以使用 screen 的日志记录功能保存 screen 窗口的内容,步骤如下:
进入想要保存内容的窗口。
按下
Ctrl + a然后按H。这会开始记录该窗口的所有输出到一个日志文件中,日志文件默认命名为screenlog.n,其中n是窗口编号。当想停止记录时,再次按下
Ctrl + a然后按H。此时日志文件就保存了窗口的内容。
visdom 使用
- 在创建的窗口中启动visdom服务器:
python -m visdom.server -port [自己指定的端口,默认是8097]- 如果使用的是远程服务器,并且希望从浏览器访问 Visdom 服务,确保防火墙允许访问您设置的端口(默认为 8097)。可以根据使用的防火墙工具执行以下操作。
- 对于
ufw防火墙:
sudo ufw allow 8097- 对于
firewalld防火墙:
sudo firewall-cmd --zone=public --add-port=8097/tcp --permanent
sudo firewall-cmd --reload- 访问visdom
在启动了 Visdom 服务之后,就可以在浏览器中访问它。假设设置的端口是默认的 8097,可以在浏览器中输入以下地址来访问 Visdom:
http://<server_ip>:8097- 代码中如何使用visdom:
import visdom
win = "window name"
vis = visdom.Visdom(env=str(win), server="ip address", port=9878)
def plot_loss(vis, epoch, train_loss, test_psnr):
vis.line(
X=np.array([[epoch]]),
Y=np.array([[train_loss]]),
win="Loss",
update="append",
opts=dict(
title="LOSS",
xlabel="Epoch",
ylabel="Loss",
legend=["total loss"],
),
)
if epoch % 10 == 0:
vis.line(
X=np.array([[epoch]]),
Y=np.array([[test_psnr]]),
win="PSNR",
update="append",
opts=dict(
title="PSNR",
xlabel="Epoch",
ylabel="PSNR",
legend=["test PSNR"],
),
)SSIM手动实现
直接调包skimage.metrics.structural_similarity经常会因为版本numpy版本问题报错,即使按照要求传入RGB通道图像也会报错,因此调用下面手动实现SSIM的代码进行计算
输入的两幅图的像素值范围是[0, 1],类型为float32
def calculate_ssim(img1, img2, crop_border=0, input_order='HWC', test_y_channel=False):
assert img1.shape == img2.shape, (f'Image shapes are differnet: {img1.shape}, {img2.shape}.')
if img1.dtype is not np.uint8:
img1 = (img1 * 255.0).round().astype(np.uint8) # float32 to uint8
if img2.dtype is not np.uint8:
img2 = (img2 * 255.0).round().astype(np.uint8) # float32 to uint8
if input_order not in ['HWC', 'CHW']:
raise ValueError(f'Wrong input_order {input_order}. Supported input_orders are ' '"HWC" and "CHW"')
img1 = reorder_image(img1, input_order=input_order)
img2 = reorder_image(img2, input_order=input_order)
img1 = img1.astype(np.float64)
img2 = img2.astype(np.float64)
if crop_border != 0:
img1 = img1[crop_border:-crop_border, crop_border:-crop_border, ...]
img2 = img2[crop_border:-crop_border, crop_border:-crop_border, ...]
if test_y_channel:
img1 = to_y_channel(img1)
img2 = to_y_channel(img2)
ssims = []
for i in range(img1.shape[2]):
ssims.append(_ssim(img1[..., i], img2[..., i]))
return np.array(ssims).mean()
def reorder_image(img, input_order='HWC'):
if input_order not in ['HWC', 'CHW']:
raise ValueError(f'Wrong input_order {input_order}. Supported input_orders are ' "'HWC' and 'CHW'")
if len(img.shape) == 2:
img = img[..., None]
if input_order == 'CHW':
img = img.transpose(1, 2, 0)
return img
def to_y_channel(img):
img = img.astype(np.float32) / 255.
if img.ndim == 3 and img.shape[2] == 3:
img = rgb2ycbcr(img, y_only=True)
img = img[..., None]
else:
raise ValueError(f'Wrong image shape [2]: {img.shape[2]}.')
return img * 255.
def rgb2ycbcr(img, y_only=False):
img_type = img.dtype
img = _convert_input_type_range(img)
if y_only:
out_img = np.dot(img, [65.481, 128.553, 24.966]) + 16.0
else:
out_img = np.matmul(
img, [[65.481, -37.797, 112.0], [128.553, -74.203, -93.786],[24.966, 112.0, -18.214]]) + [16, 128, 128]
out_img = _convert_output_type_range(out_img, img_type)
return out_img
def _convert_input_type_range(img):
img_type = img.dtype
img = img.astype(np.float32)
if img_type == np.float32:
pass
elif img_type == np.uint8:
img /= 255.
else:
raise TypeError('The img type should be np.float32 or np.uint8, ' f'but got {img_type}')
return img
def _convert_output_type_range(img, dst_type):
if dst_type not in (np.uint8, np.float32):
raise TypeError('The dst_type should be np.float32 or np.uint8, ' f'but got {dst_type}')
if dst_type == np.uint8:
img = img.round()
else:
img /= 255.
return img.astype(dst_type)PSNR
from skimage.metrics import peak_signal_noise_ratio只能计算 numpy 数组,传入 tensor 张量是不能计算的,并且传入的两幅图只要维度对应就行,不要求图片的维度顺序一定是h w c,图片维度是c h w也可以计算,不影响结果- 转换为 255 的存图时来计算,别直接用小数来计算
递归crop进行模型验证
验证模型时,整图输入预训练好的模型,会因为硬件条件不足报错out of memory,解决办法是将输入图像有重叠地裁成小块,输入模型,按块进行推理,最后将各个块进行拼接,以达到整图测试的效果。
具体实现:
输入:shape为(b n h w c)的光场图像,其中b为batch维,n为角度分辨率u×v
输出:shape为(b h w c)的模型输出图
def overlap_crop_forward(x, model, scale=1, max_length=32, shave=0, mod=1):
"""chop for less memory consumption during test"""
global sr_batch
n_GPUs = 1
b, n, h, w, c = x.size()
h_half, w_half = h // 2, w // 2
h_size, w_size = int(math.ceil((h_half + shave) / mod) * mod), int(
math.ceil((w_half + shave) / mod) * mod
)
lr_list = [
x[..., 0:h_size, 0:w_size, :],
x[..., 0:h_size, (w - w_size) : w, :],
x[..., (h - h_size) : h, 0:w_size, :],
x[..., (h - h_size) : h, (w - w_size) : w, :],
]
sr_list = []
for i in range(0, 4, n_GPUs):
lr_batch = torch.cat(lr_list[i : (i + n_GPUs)], dim=0)
if lr_batch.shape[2] > max_length or lr_batch.shape[3] > max_length:
sr_batch_temp = overlap_crop_forward(
lr_batch,
model,
scale=scale,
max_length=max_length,
shave=shave,
mod=mod,
)
else:
lr_batch = rearrange(lr_batch, "b n h w c -> b n c h w")
sr_batch_temp = model(lr_batch)
sr_batch_temp = rearrange(sr_batch_temp, "b c h w -> b h w c")
if isinstance(sr_batch_temp, tuple):
sr_batch = sr_batch_temp[-1]
else:
sr_batch = sr_batch_temp # sr_batch 1 3 32 32
sr_list.extend(sr_batch.chunk(n_GPUs, dim=0))
h, w = scale * h, scale * w
c = sr_batch.shape[3]
output = x.new(b, h, w, c) # 1 64 64 32?
output[:, 0:h_half, 0:w_half, :] = sr_list[0][:, :h_half, :w_half, :]
output[:, 0:h_half, w_half:w, :] = sr_list[1][:, :h_half, -(w - w_half) :, :]
output[:, h_half:h, 0:w_half, :] = sr_list[2][:, -(h - h_half) :, :w_half, :]
output[:, h_half:h, w_half:w, :] = sr_list[3][
:, -(h - h_half) :, -(w - w_half) :, :
]
return outputargparser
管理训练参数时用
import argparse
def get_parser():
parser = argparse.ArgumentParser(description='Training Config')
# data
parser.add_argument('--patch_size', type=int, default=64, help='patch size')
parser.add_argument('--batch_size', type=int, default=1, help='batch size')
parser.add_argument('--dir_train_images', type=str, default='./Dataset/LF_3/')
parser.add_argument('--dir_test_images', type=str, default='./Dataset/Synscenes_3/')
# model
parser.add_argument('--model_name', type=str, default='DeoccNet', help='model name')
parser.add_argument('--model_msg', type=str, default='NoTagModel', help='model tagging information')
parser.add_argument('--channels', type=int, default=32, help='number of model channels')
parser.add_argument('--views_num', type=int, default=9, help='number of LF views')
parser.add_argument('--max_disp', type=int, default=4, help='LF maximum disparity')
parser.add_argument('--step', type=int, default=1, help='disparity step')
parser.add_argument('--dir_save_name', type=str, default=None, help='model path')
# train
parser.add_argument('--device', type=str, default='cuda:2', help=' GPU device')
parser.add_argument('--current_iter', type=int, default=0, help='current epoch when continue train')
parser.add_argument('--epochs', type=int, default=10000, help='number of epochs to train')
parser.add_argument('--lr', type=float, default=1e-4, help="learning rate")
parser.add_argument('--decay_step', type=int, default=200, help='learning rate decay step')
parser.add_argument('--gamma', type=float, default=0.1, help='learning rate decay gamma')
parser.add_argument('--visdom', type=int, default=0, help='if visdom')
parser.add_argument('--if_validation', type=int, default=0, help='if validation')
parser.add_argument('--if_debug', type=int, default=0, help='if debug')
# test
parser.add_argument('--shave', type=int, default=16, help='shave')
parser.add_argument('--mod', type=int, default=8, help='mod')
args = parser.parse_args()
return args
if __name__ == '__main__':
args = get_parser()
# 逐行打印参数
for arg, value in vars(args).items():
print(f"{arg:<15}: {value}")模型
统计模型参数量
def get_parameter_number(net):
print(net)
parameter_list = [p.numel() for p in net.parameters()]
print(parameter_list)
total_num = sum(parameter_list)
trainable_num = sum(p.numel() for p in net.parameters() if p.requires_grad)
print({'Total': total_num, 'Trainable': trainable_num})模型初始化
from torch.nn import init
def weights_init_xavier(m):
classname = m.__class__.__name__
# print(classname)
if classname.find('Conv') != -1:
init.xavier_normal_(m.weight.data, gain=init.calculate_gain('relu'))
# init.xavier_uniform_(m.bias.data, gain=0.02)
elif classname.find('Linear') != -1:
init.xavier_normal_(m.weight.data, gain=0.2)
elif classname.find('BatchNorm2d') != -1:
init.normal_(m.weight.data, 1.0, 0.02)
init.constant_(m.bias.data, 0.0)
# 应用
model.apply(weights_init_xavier)随机种子
def seed_torch(seed=1029):
random.seed(seed)
# 确保 Python 字典、集合等数据结构在不同运行时的哈希顺序一致,从而保证代码的可重复性。
os.environ['PYTHONHASHSEED'] = str(seed)
np.random.seed(seed)
# 设置了 PyTorch 在 CPU 上的随机种子,保证在 CPU 上进行的随机操作结果可重复。
torch.manual_seed(seed)
# 设置 PyTorch 在当前 CUDA 设备(GPU)上的随机种子,确保在当前 GPU 上进行的随机操作结果可重复。
torch.cuda.manual_seed(seed)
# 为所有的 GPU 设置相同的随机种子,保证在所有 GPU 上的随机操作结果可重复。
torch.cuda.manual_seed_all(seed)
# benchmark 模式会在每次运行时自动寻找最优的卷积算法,以提高计算效率。但这种自动寻找算法的过程会引入随机性,将 benchmark 设置为 False 可以关闭该功能,保证卷积操作的确定性。 模型训练时关闭,测试时打开。
torch.backends.cudnn.benchmark = False
# 开启 cudnn 的确定性模式,确保在使用 cudnn 进行卷积操作时,每次运行的结果都是相同的。
torch.backends.cudnn.deterministic = True深度学习
激活函数
模块输出时一般不用激活函数,只在模块中间的隐藏层用激活函数
通常用于隐藏层,用于引入非线性,使得神经网络能够学习和逼近复杂的函数 。常见的激活函数包括:
- ReLU:可能会导致“死亡神经元”问题(输入小于 0 时,ReLU 输出为 0,导致该神经元无法更新)。
- Leaky ReLU:避免 ReLU 的“死亡神经元”问题, 在负值区间允许有微小的负斜率(一般设置为 0.01,王应谦设的 0.1)。
- Sigmoid(二分类)、Tanh(时序任务会用到)、Softmax(多分类,转换为概率分布) 等。
BatchNorm
batch小的情况下(batch<8)不要用BatchNorm
- 避免模型过拟合
- 放置位置:BatchNorm 通常应用于每个卷积层或全连接层后,但通常会放在激活函数之前或之后(具体顺序可调整)。常见的顺序是:
Conv -> BatchNorm -> ReLU,即卷积层后先进行标准化,再经过激活函数。 - 训练时和推理时的不同:在训练时,BatchNorm 会使用 mini-batch 的均值和方差进行标准化;而在推理时,它会使用训练过程中累积的均值和方差。
nn.Conv2d
nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode='zeros')
对于空洞卷积(dilation>1):
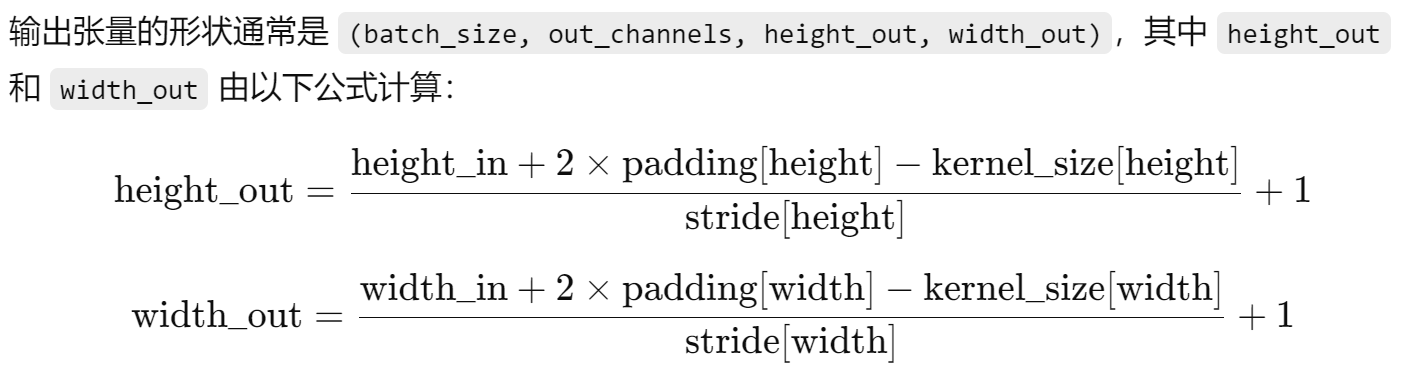
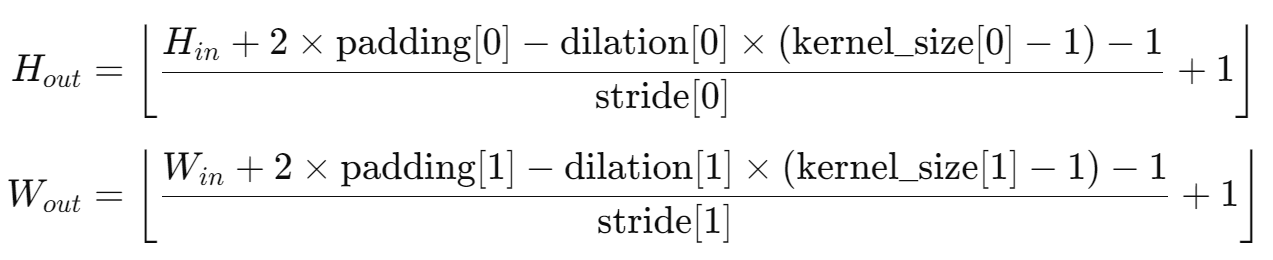
- 卷积核的尺寸。可以是单一的整数,表示高和宽都为该值,或者是一个包含高度和宽度的元组
(height, width),kernel_size=3表示卷积核大小为 3x3。
常见的不改变输入尺寸h w的卷积参数设置:
- 3 1 1 和 1 1 0(kernel_size, stride, padding)表示不改变输出尺寸,在空间上进行卷积
- 3 1 2 2(kernel_size, stride, padding, dilation)也不改变输出尺寸
Unet模型就是2D卷积组成的
nn.Conv3d
nn.Conv3d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode='zeros')
对于空洞卷积(dilation>1)
nn.Conv3d 主要看 kernel_size 如何设置,并且看输入的构成,看 input 的后三维是什么,来确定是对角度维 u v 进行融合还是对通道维 h w 进行融合
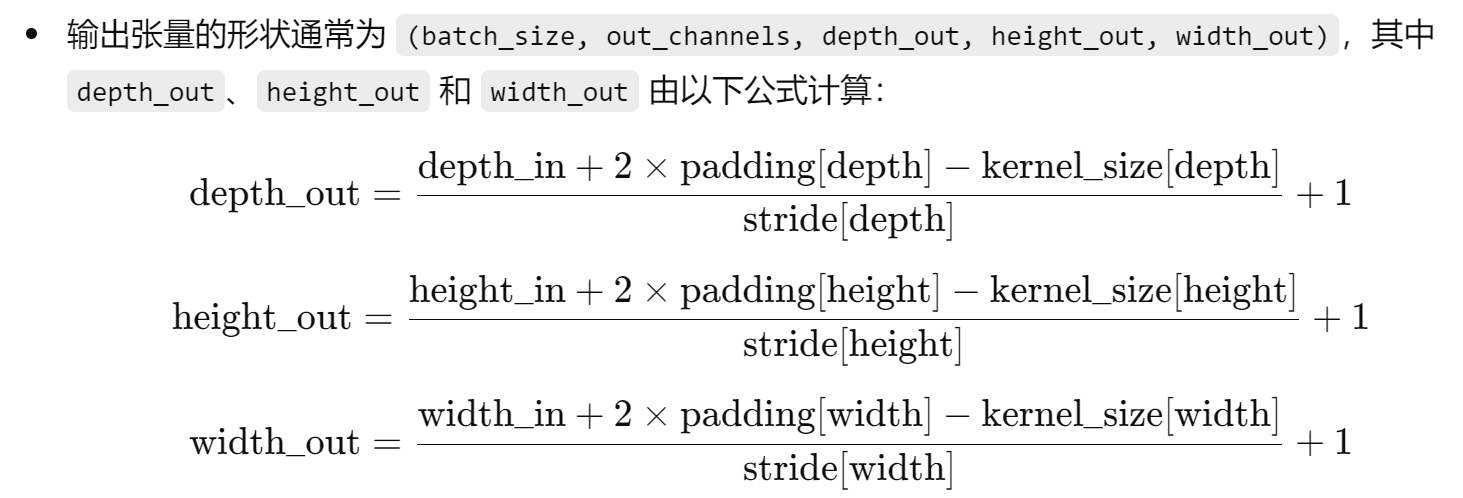
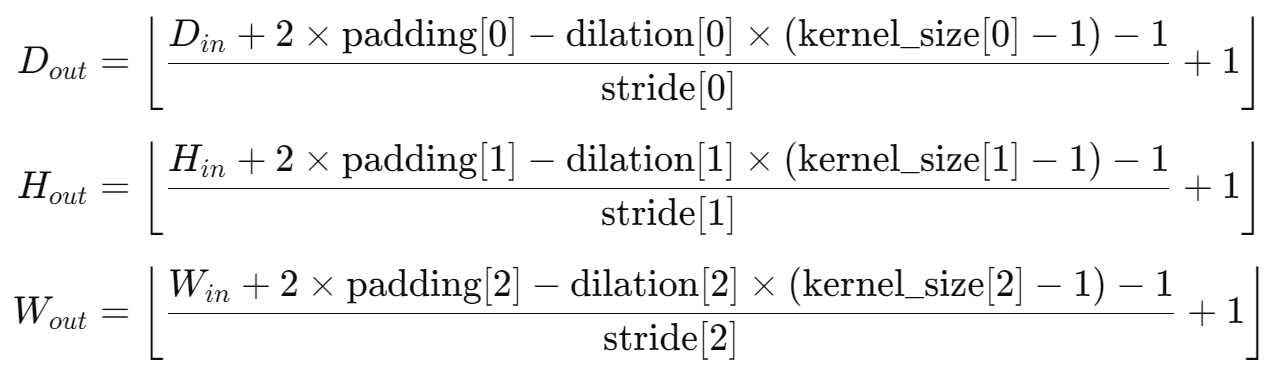
- kernel_size 为卷积核尺寸, 可以是一个单一的整数(表示每个维度的大小相同),也可以是一个三元组
(depth, height, width),kernel_size=3表示卷积核为 3x3x3。 - 对于LF:一般把
(b c u v h w)的光场reshape到(b c u*v h w),将u*v作为深度维,进行3D卷积,如果kernel_size=(3, 3, 3) 那就是在角度和空间维一起进行卷积,如果kernel_size=(1, 3, 3) 就是只在空间维进行卷积,其实也就相当于2D卷积。
常见的不改变输入尺寸的卷积参数设置:
- 3 1 1 和 1 1 0(kernel_size, stride, padding)都不改变输出尺寸,在深度维 d 和空间维 h w 上进行卷积
- 3 1 2 2(kernel_size, stride, padding, dilation)也不改变输出尺寸
数据类型转换
numpy 转 tensor:tensor = torch.from_numpy(numpy_array)
tensor 转 numpy:numpy_array = tensor.numpy()
!!!注意:numpy 转 tensor 时,torch.from_numpy() 返回的张量与原始 NumPy 数组共享内存,修改一个会影响另一个 ,因此一般在自定义数据集类的最后返回数据的复制,采用如下操作:
train_image = trian_image.copy()变换维度顺序
- numpy 数组改变维度顺序用
array.transpose(1, 2, 0) - tensor 张量改变维度顺序用
tensor.permute(1, 2, 0) - 函数
einops.rearrange(numpy / tensor, 'c h w -> h w c')可以改变 numpy 数组或者 tensor 的维度顺序
扩充维度顺序
tensor.unsqueeze(维度扩充的位置)tensor.repeat(1, 5, 1, 1):针对第二个维度复制 5 次tensor.expand_as(已有的 tensor 变量 tensor1):把 tensor 的维度扩充至和 tensor1 相同的维度
GPU与CPU设备切换
- **GPU 和 CPU 之间的切换:**在训练或者测试时,每次迭代器加载出数据都要先用
.to(device).float()转移到 GPU 后再输入模型,但是在计算指标时记得用.cpu().numpy()转为 numpy 数组到 CPU 上计算,因为有些指标函数仅支持 numpy 数组的计算(比如 PSNR) - 运行代码:训练和测试的代码先在 PyCharm 中 debug,然后才在终端 / OpenPAI 上跑,简单的代码才直接在 PyCharm 里运行